SchedulingQueue三级调度队列实现
SchedulingQueue三级调度队列实现
SchedulingQueue是kubenrets scheduler中负责进行等待调度pod存储的对,Scheduler通过SchedulingQueue来获取当前系统中等待调度的Pod,本文主要讨论SchedulingQueue的设计与实现的各种实现, 了解探究其内部实现与底层源码,本系列代码基于kubernets1.1.6分析而来
1. SchedulingQueue设计
1.1 队列与优先级
1.1.1 队列与场景
| 类型 | 描述 | 通常实现 |
|---|---|---|
| 队列 | 普通队列是一个FIFO的数据结构,根据元素入队的次序依次出队 | 数组或者链表 |
| 优先级队列 | 优先级队列通常是指根据某些优先级策略,高优先级会优先被获取 | 数组或者树 |
其实在大多数的调度场景中,大多都是采用优先级队列来实现,优先满足优先级比较高的任务或者需求,从而减少后续高优先级对低优先级的抢占,scheduler中也是如此
1.1.2 优先级的选择
k8s中调度的单元是Pod,scheduler中根据pod的优先级的高低来进行优先级队列的构建, 这个其实是在kubernets的adminission准入插件中,会为用户创建的pod根据用户的设置,进行优先级字段的计算
1.2 三级队列
1.2.1 活动队列
活动队列存储当前系统中所有正在等待调度的队列
1.2.2 不可调度队列
当pod的资源在当前集群中不能被满足时,则会被加入到一个不可调度队列中,然后等待稍后再进行尝试
1.2.3 backoff队列
backoff机制是并发编程中常见的一种机制,即如果任务反复执行依旧失败,则会按次增长等待调度时间,降低重试效率,从而避免反复失败浪费调度资源
针对调度失败的pod会优先存储在backoff队列中,等待后续重试
1.3 阻塞与抢占
1.3.1 阻塞设计
当队列中不存在等待调度的pod的时候,会阻塞scheduler等待有需要调度的pod的时候再唤醒调度器,获取pod进行调度
1.3.2 抢占相关
nominatedPods存储pod被提议运行的node,主要用于抢占调度流程中使用,本节先不分析
2. 源码分析
2.1 数据结构
kubernetes中默认的schedulingQueue实现是PriorityQueue,本章就以该数据结构来分析
1 | type PriorityQueue struct { |
PriorityQueue作为实现SchedulingQueue的实现,其核心数据结构主要包含三个队列:activeQ、podBackoffQ、unscheduleQ内部通过cond来实现Pop操作的阻塞与通知,接下来先分析核心的调度流程,最后再分析util.Heap里面的具体实现
2.1.1 activeQ
存储所有等待调度的Pod的队列,默认是基于堆来实现,其中元素的优先级则通过对比pod的创建时间和pod的优先级来进行排序
1 | // activeQ is heap structure that scheduler actively looks at to find pods to |
优先级比较函数
1 | // activeQComp is the function used by the activeQ heap algorithm to sort pods. |
2.1.2 podbackOffQ
podBackOffQ主要存储那些在多个schedulingCycle中依旧调度失败的情况下,则会通过之前说的backOff机制,延迟等待调度的时间
1 | // podBackoffQ is a heap ordered by backoff expiry. Pods which have completed backoff |
2.1.3 podBackOff
上面提到podBackOffQ队列中并没有存储pod的backOff的具体信息,比如backoff的计数器,最后一次更新的时间等,podBackOff则类似一个记分板,记录这些信息,供podBackOffQ使用
1 | // podBackoff tracks backoff for pods attempting to be rescheduled |
2.1.4 unschedulableQ
存储已经尝试调度但是当前集群资源不满足的pod的队列
2.1.5 moveRequestCycle
当因为集群资源发生变化会尝试进行unschedulableQ中的pod转移到activeQ,moveRequestCycle就是存储资源变更时的schedulingCycle
1 | func (p *PriorityQueue) MoveAllToActiveQueue() { |
2.1.6 schedulingCycle
schedulingCycle是一个递增的序列每次从activeQ中pop出一个pod都会递增
1 | func (p *PriorityQueue) Pop() (*v1.Pod, error) { |
2.2 并发活动队列
2.2.1 并发从活动队列中获取pod
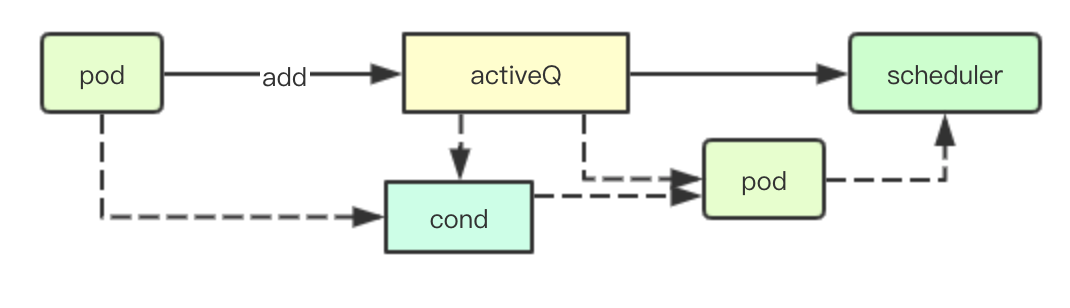
SchedulingQueue提供了一个Pop接口用于从获取当前集群中等待调度的pod,其内部实现主要通过上面cond与activeQ来实现
当前队列中没有可调度的pod的时候,则通过cond.Wait来进行阻塞,然后在忘activeQ中添加pod的时候通过cond.Broadcast来实现通知
1 | func (p *PriorityQueue) Pop() (*v1.Pod, error) { |
2.2.2 加入调度pod到活动队列
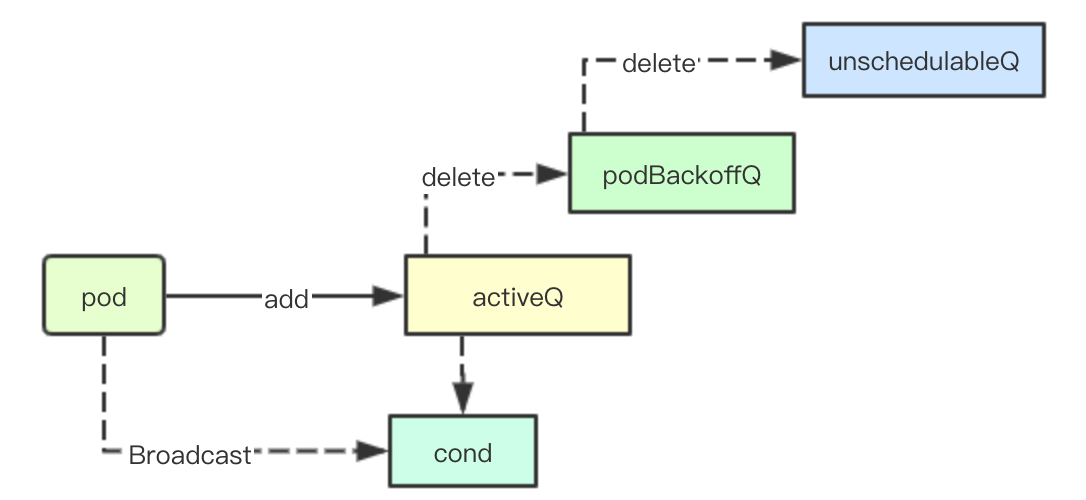
当pod加入活动队列中,除了加入activeQ的优先级队列中,还需要从podBackoffQ和unschedulableQ中移除当前的pod,最后进行广播通知阻塞在Pop操作的scheudler进行最新pod的获取
1 | func (p *PriorityQueue) Add(pod *v1.Pod) error { |
2.3 schedulingCycle与moveRequestCycle
2.3.1 未调度的队列的及时重试
导致调度周期schedulingCyclye变更主要因素如下:
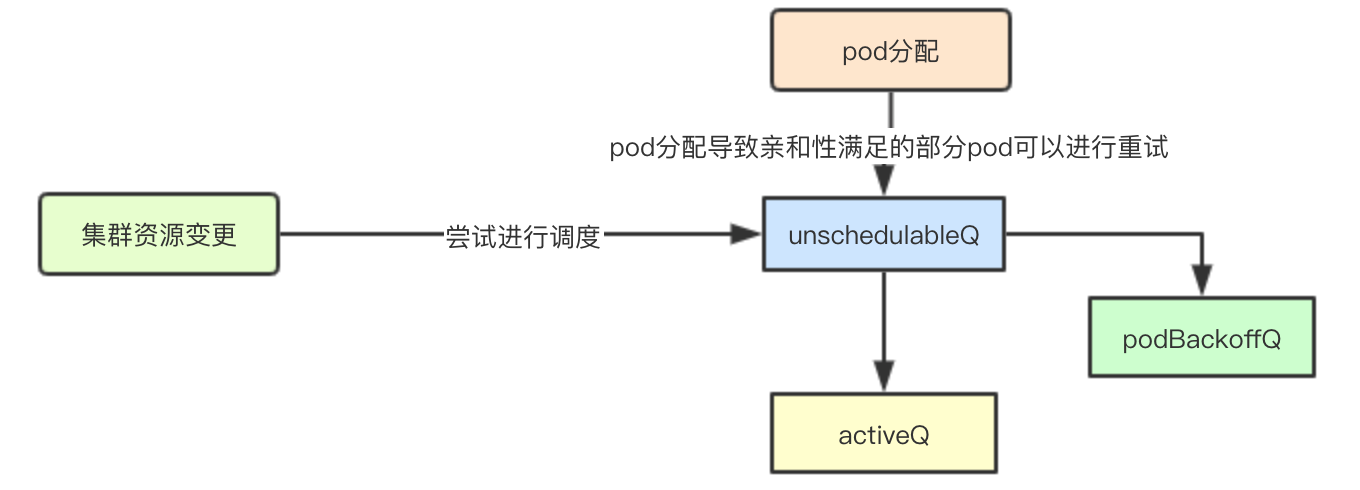
1.当集群资源发生变化的时候:比如新添加pv、node等资源,那之前在unschedulableQ中因为资源不满足需求的pod就可以进行放入activeQ中或者podBackoffQ中,及时进行调度
2.pod被成功调度: 之前由于亲和性不满足被放入到unschedulableQ中的pod,此时也可以进行尝试,而不必等到超时之后,再加入
这两种情况下会分别触发MoveAllToActiveQueue和movePodsToActiveQueue变更moveRequestCycle使其等于schedulingCycle
2.3.2 对重试机制的影响
当前一个pod失败的时候,有两种选择一是加入podBackoffQ中,二是加入unschedulableQ中,那么针对一个失败的pod如何选择该进入那个队列中呢
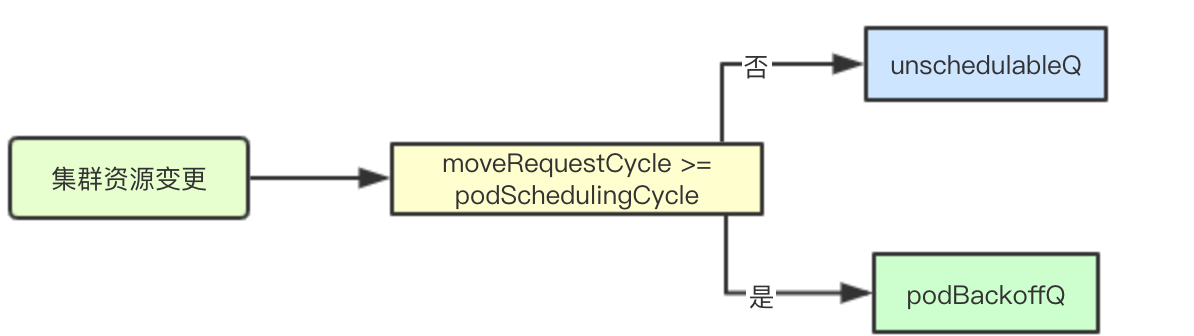
结合上面的moveRequestCycle变更时机,什么时候moveRequestCycle会大于等于podSchedulingCycle呢?答案就是当前集群中进行过集群资源的变更或者pod被成功分配,那这个时候我们如果重试一个失败的调度则可能会成功,因为集群资源变更了可能有新的资源加入, 如果发生调度器重启的情况下,则会出现moveRequestCycle大于当前的podSchedulingCycle则当前应该对之前已经失败的pod进行重试,而不是加入到unschedulable中
1 | if p.moveRequestCycle >= podSchedulingCycle { |
2.4 失败处理逻辑的注入
2.3.1 注入调度失败逻辑处理
在创建scheduler Config的时候会通过MakeDefaultErrorFunc注入一个失败处理函数, 在scheduler调度的时候会进行调用
kubernetes/pkg/scheduler/factory/factory.go: MakeDefaultErrorFunc会将没有调度到任何一个node的pod重新放回到优先级队列中
1 | podSchedulingCycle := podQueue.SchedulingCycle() |
2.3.2 失败处理的回调
当调度pod的失败的时候, scheduler会同时调用sched.Error就是上面注入的失败处理逻辑,来将调度失败未分配node的pod节点重新加入到队里钟
kubernetes/pkg/scheduler/scheduler.go
1 | func (sched *Scheduler) recordSchedulingFailure(pod *v1.Pod, err error, reason string, message string) { |
2.5 PodBackoffMap
PodBackoffMap主要用于存储pod的最后一次失败的更新时间与实现次数,从而根据这些数据来进行pod的backoffTime的计算
2.5.1 数据结构设计
1 | type PodBackoffMap struct { |
2.5.2 backoffTime计算算法
初始化的时候回设定initialDuration和maxDuration,在当前版本中分别是1s和10s,也就是backoffQ中的pod最长10s就会重新加入activeQ中(需要等待定时任务进行辅助)
在每次失败回调的时候,都会进行BackoffPod方法来进行计数更新,在后续获取pod的backoffTime的时候,只需要获取次数然后结合initialDuration进行算法计算,结合pod最后一次的更新时间,就会获取pod的backoffTime的终止时间
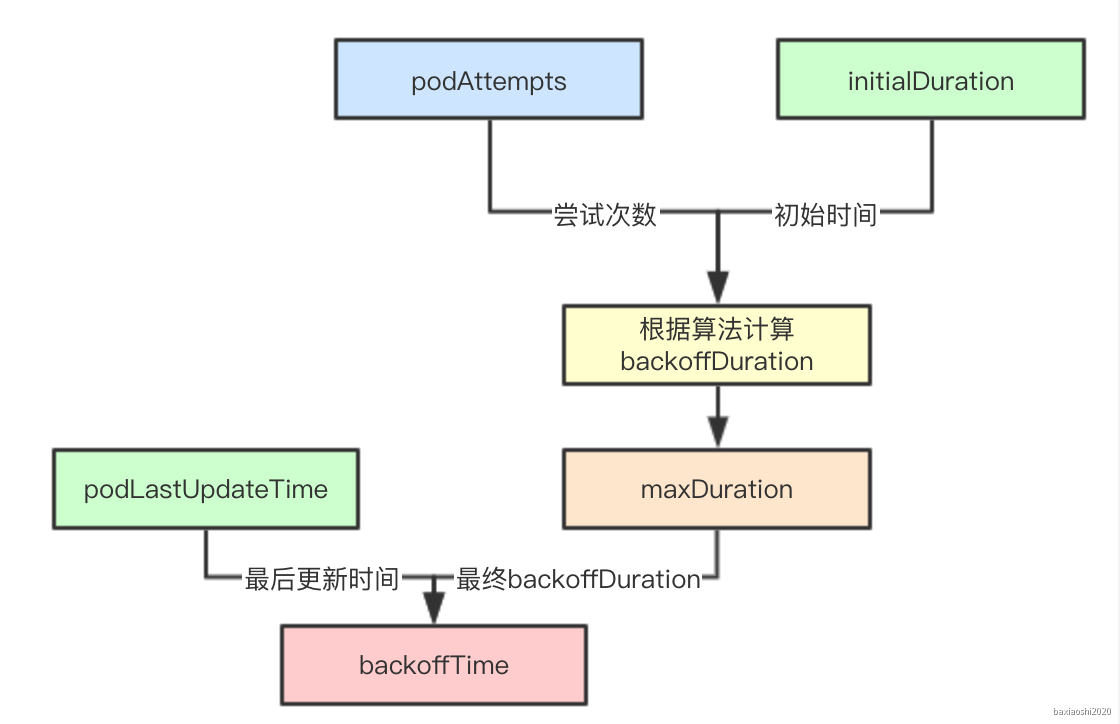
2.5.3 backoffDuration计算
其实最终的计算很简单就是2的N次幂
1 | func (pbm *PodBackoffMap) calculateBackoffDuration(nsPod ktypes.NamespacedName) time.Duration { |
2.6 podBackoffQ
2.6.1 优先级函数
podBackoffQ实际上会根据pod的backoffTime来进行优先级排序,所以podBackoffQ的队列头部,就是最近一个要过期的pod
1 | func (p *PriorityQueue) podsCompareBackoffCompleted(podInfo1, podInfo2 interface{}) bool { |
2.6.2 调度失败加入到podBackoffQ
如果调度失败,并且moveRequestCycle=podSchedulingCycle的时候就加入podBackfoffQ中
1 | func (p *PriorityQueue) AddUnschedulableIfNotPresent(pod *v1.Pod, podSchedulingCycle int64) error { |
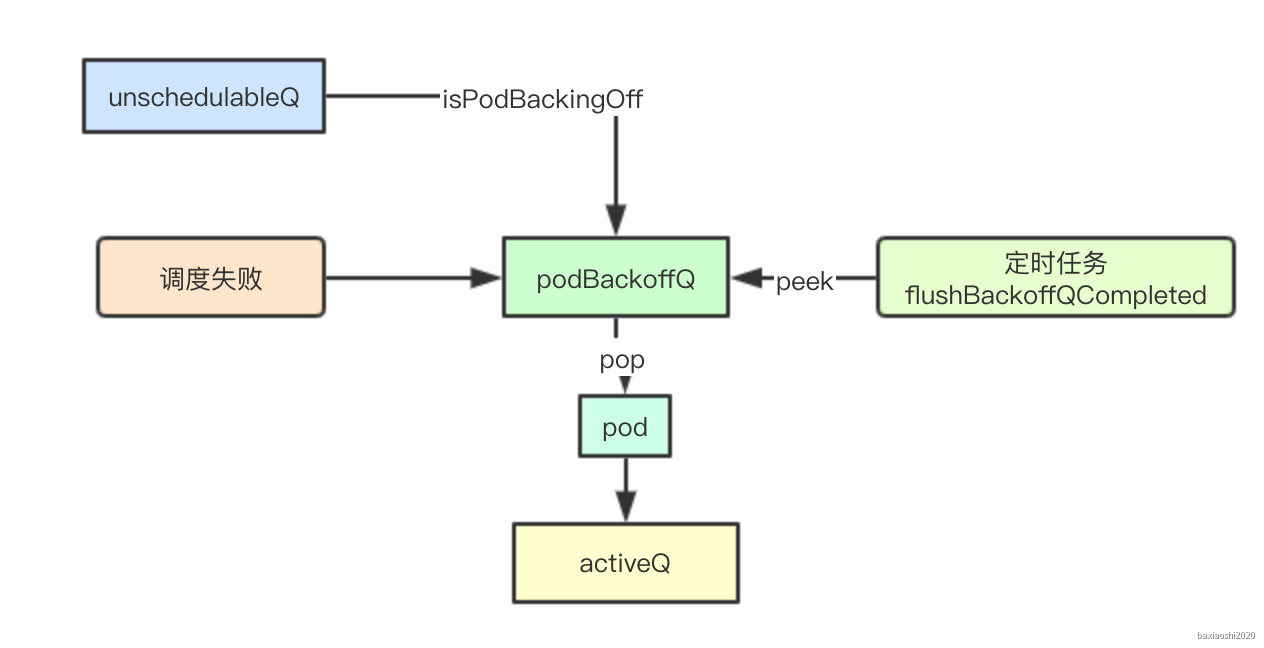
2.6.3 从unschedulableQ迁移
在前面介绍的当集群资源发生变更的时候,会触发尝试unschedulabelQ中的pod进行转移,如果发现当前pod还未到达backoffTime,就加入到podBackoffQ中
1 | if p.isPodBackingOff(pod) { |
2.6.4 podBackoffQ定时转移
在创建PriorityQueue的时候,会创建两个定时任务其中一个就是讲backoffQ中的pod到期后的转移,每秒钟尝试一次
1 | func (p *PriorityQueue) run() { |
因为是一个堆结果,所以只需要获取堆顶的元素,然后确定是否到期,如果到期后则进行pop处来,加入到activeQ中
1 | func (p *PriorityQueue) flushBackoffQCompleted() { |
2.7 unschedulableQ
2.7.1 调度失败
调度失败后,如果当前集群资源没有发生变更,就加入到unschedulable,原因上面说过
1 | func (p *PriorityQueue) AddUnschedulableIfNotPresent(pod *v1.Pod, podSchedulingCycle int64) error { |
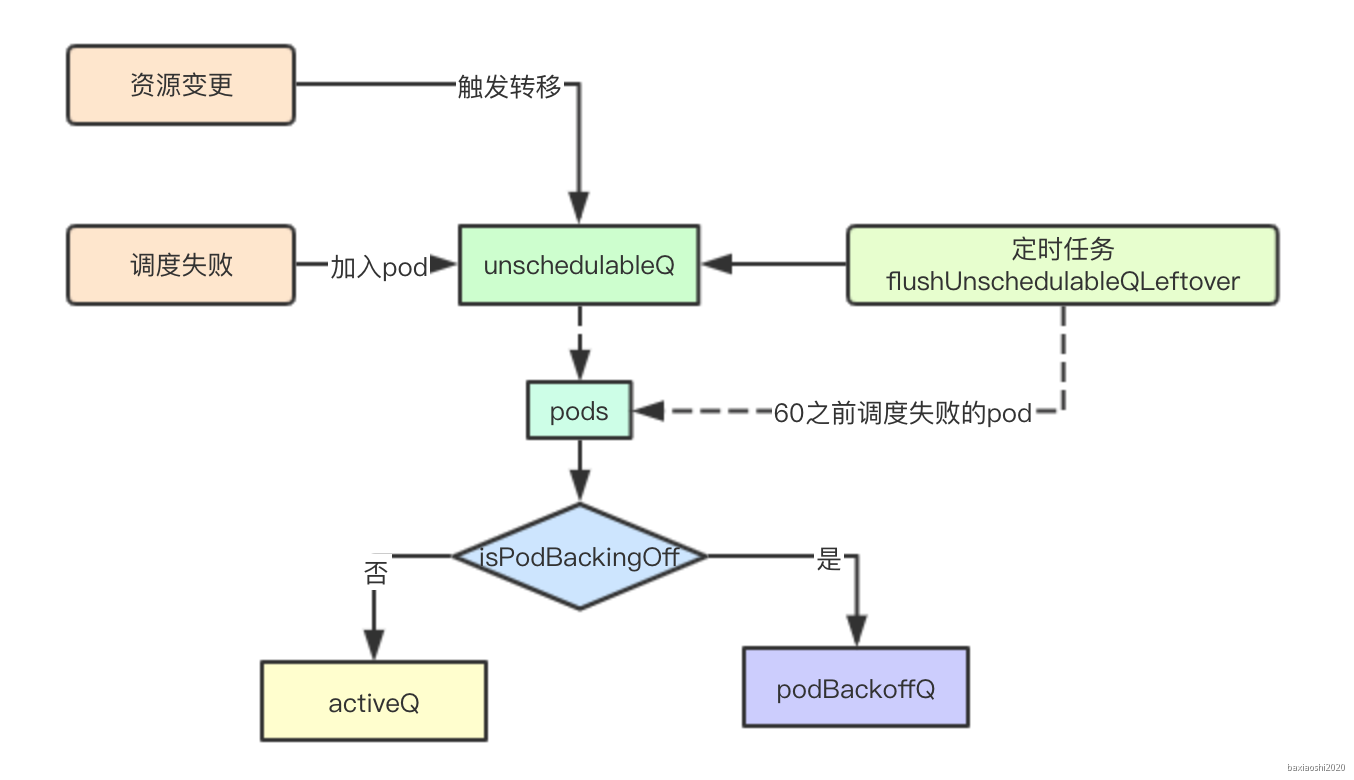
2.7.2 定时转移任务
定时任务每30秒执行一次
1 | func (p *PriorityQueue) run() { |
逻辑其实就非常简单如果当前时间-pod的最后调度时间大于60s,就重新调度,转移到podBackoffQ或者activeQ中
1 | func (p *PriorityQueue) flushUnschedulableQLeftover() { |
3. 调度队列总结
3.1 数据流设计总结
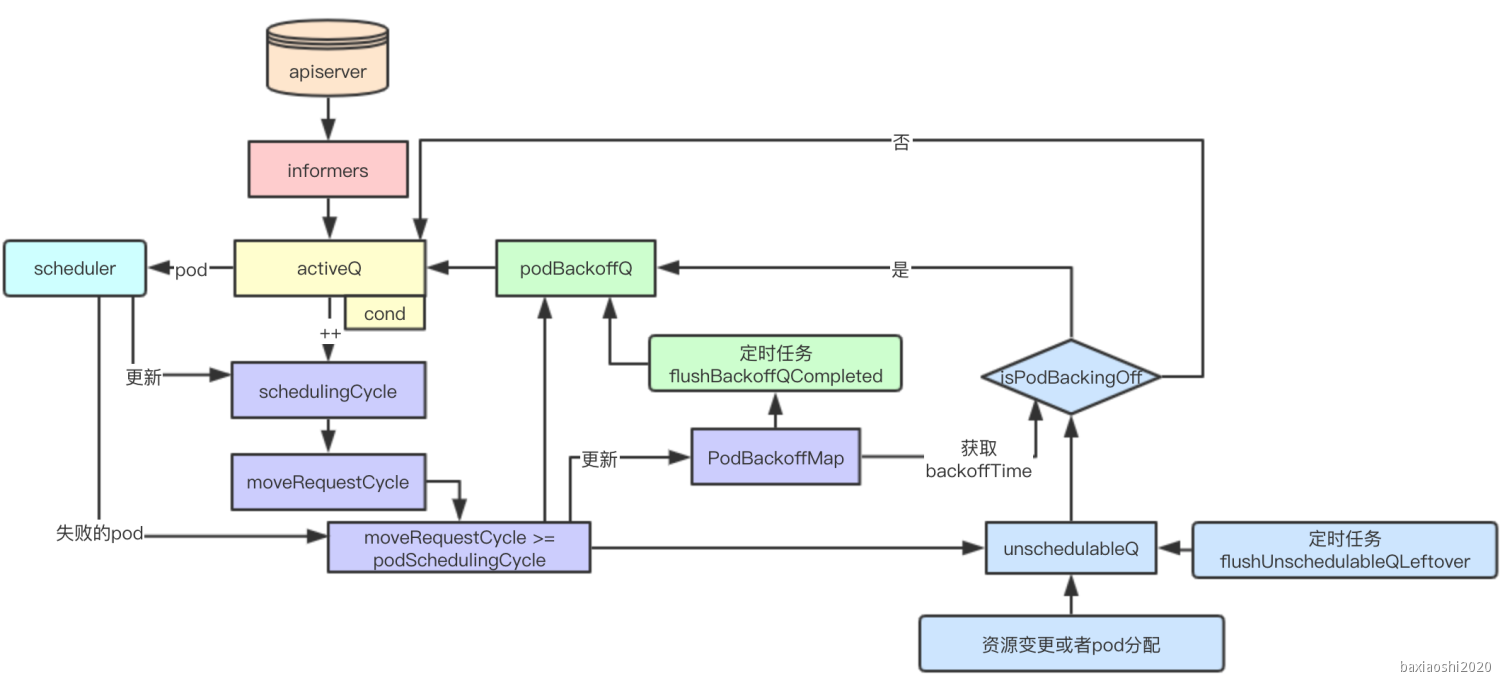
3.1.1 三队列与后台定时任务
从设计上三队列分别存储:活动队列、bakcoff队列、不可调度队列,其中backoff中会根据任务的失败来逐步递增重试时间(最长10s)、unschedulableQ队列则延迟60s
通过后台定时任务分别将backoffQ队列、unschedulableQ队列来进行重试,加入到activeQ中,从而加快完成pod的失败重试调度
3.1.2 cycle与优先调度
schedulingCycle、moveRequestCycle两个cycle其实本质上也是为了加快失败任务的重试调度,当集群资源发生变化的时候,进行立即重试,那些失败的优先级比较高、亲和性问题的pod都可能会被优先调度
3.1.3 锁与cond实现线程安全pop
内部通过lock保证线程安全,并通过cond来实现阻塞等待,从而实现阻塞scheduler worker的通知
今天就分析到这里,其实参考这个实现,我们也可以从中抽象出一些设计思想,实现自己的一个具有优先级、快速重试、高可用的任务队列,先分析到这,下一个分析的组件是SchedulerCache, 感兴趣可以加我微信一起交流学习,毕竟三个臭皮匠算计不过诸葛亮